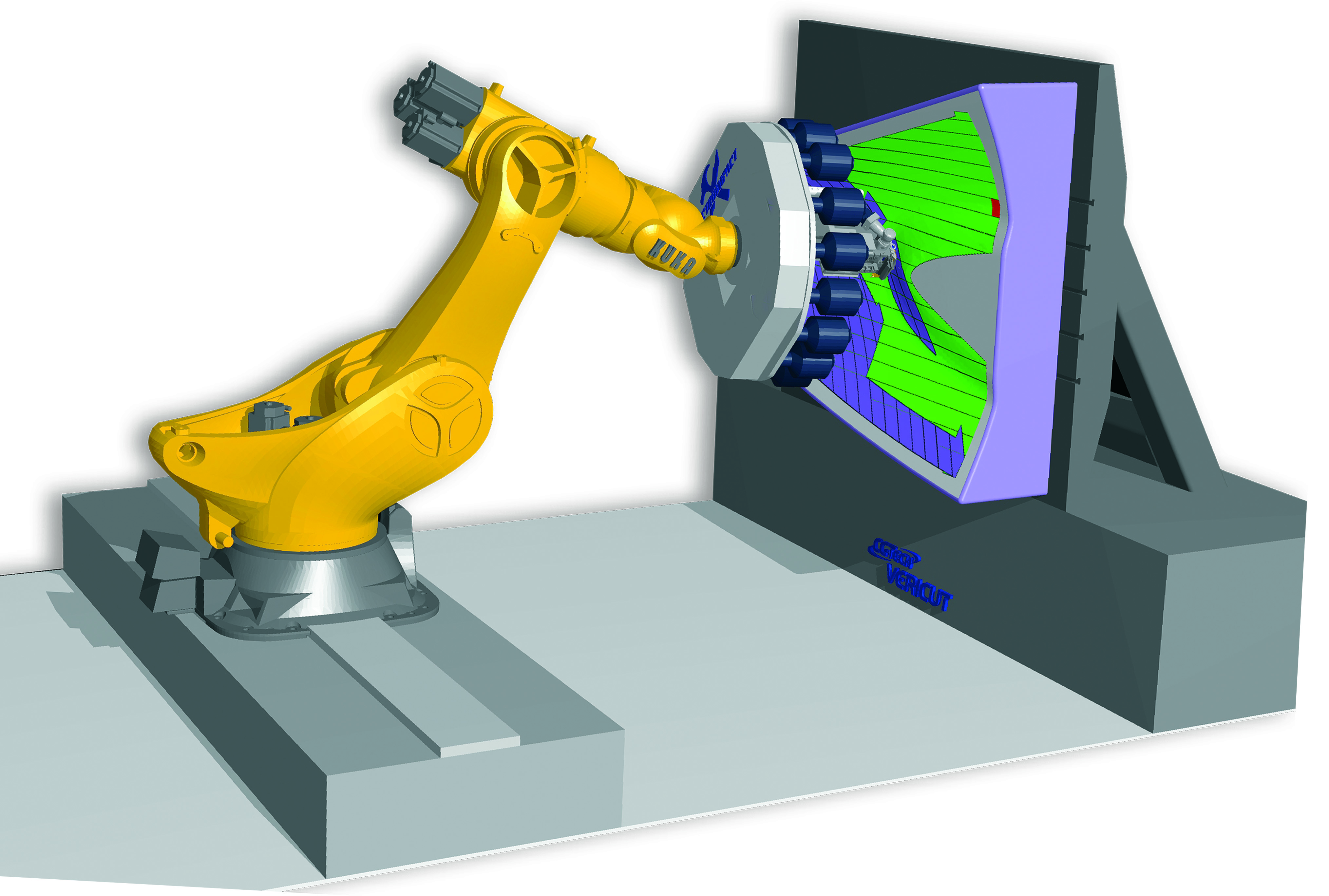
CGTech simule les trajectoires afin d’optimiser le pilotage des robots.
Reconnu dans la simulation de placement de fibre automatique (AFP) et des machines pour la pose de bandes (ATL), CGTech offre depuis 2004 une solution aboutie pour un marché proche de son ADN, la robotique.
Il est important de comprendre que les robots ne reproduisent pas simplement le mouvement d’un homme. La robotique est l’avenir de l’industrie et partage les mêmes problématiques que nous, simuler et optimiser afin d’obtenir les meilleures performances. Associée à une productique ingénieuse, la chaîne de production ne pourra se passer de la robotique. Bien plus qu’une évolution technique, c’est l’ensemble d’une filière qui est en mutation et nous accompagnons les entrepreneurs d’aujourd’hui et de demain à franchir ce pas stratégique qui marque notre histoire. Je suis persuadé que la robotique permettra de redorer l’image de l’industrie française. Une révolution industrielle est en marche… »
Arnaud Prunet, Responsable Marketing
CGTech France.
CGTech propose la simulation des trajectoires qui pilotent les robots. Ce procédé permet d’offrir un outil de qualité et de contrôle indispensable pour assurer le bon fonctionnement de la chaîne de production. Le logiciel prend en compte le code qui est envoyé directement au robot pour le faire fonctionner. Le logiciel apporte une simulation réelle des trajectoires à ne pas confondre avec une simple visualisation. On parle ici d’un procédé de vérification totalement indépendant des cinématiques robots, indépendant des armoires de commande, indépendant des CFAO en amont qui gèrent les trajectoires de ces derniers.
« Nous sommes actifs directement dans le coeur du robot, son code source, afin de pouvoir le simuler vraiment. CGTech est la seule société à proposer ce type de simulation. »
Philippe Deniset, Country Manager
CGTech France.

Aujourd’hui, il est possible de simuler les robots poly-articulés de fabricants tels que Fanuc, Kuka, ABB, Kawasaki et bien d’autres encore. Mais également les robots qui ont des axes « externes » supplémentaires. Par exemple, les robots montés sur un axe linéaire (ou une pièce sur un axe rotatif ) peuvent considérablement améliorer son utilité, sa portée, sa rigidité, sa vitesse et sa précision. En plus de la simulation, le logiciel peut aussi être utilisé pour optimiser les mouvements des robots. Il calcule les positions à partir des orientations et des positions de l’outil ; il « post-processe » ensuite le programme dans le langage spécifique du robot. La plupart des robots sont programmés par apprentissage. La programmation hors-ligne est préférable quand il y a beaucoup d’enchainements de mouvements, que des positions précises à atteindre sont nécessaires ou que le processus doit être contrôlé ou tracé. Les tâches caractéristiques de la programmation hors ligne comprennent à la fois le détourage, le perçage et le rivetage ainsi que le placement de fibres.
EQUIP’PROD N° 58 juin 2014